

Решения компании STMicroelectronics для управляемого электропривода
![]()
С объектами, приводимыми в движение электрическими машинами, человек постоянно сталкивается как в сфере промышленности и транспорта, так и в быту. Устройства с электроприводом - это стиральная машина, вентилятор, кофемолка, пылесос и т.д.
Так как основным средством приведения в движение рабочих машин является электрический двигатель, то, соответственно, основным типом привода служит электрический привод или сокращенно электропривод.
Основные элементы управляемого электропривода представлены на рисунке 1.
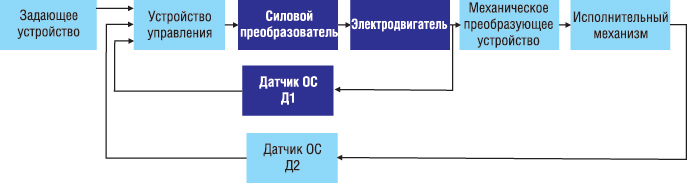
Рис. 1. Обобщенная схема управляемого электропривода
Требуемые значения регулируемых переменных задаются с помощью задающего устройства.
На основании этих значений и сигналов обратной связи устройство управления формирует сигналы на силовой преобразователь (драйвер), предназначенный для создания регулирующего воздействия на электродвигатель.
Электродвигатель преобразует электрическую энергию в механическую. В качестве электродвигателя могут использоваться асинхронные и синхронные двигатели, двигатели постоянного тока, шаговые двигатели и др.
Механическая энергия от электродвигателя передается к исполнительному механизму через механическое передаточное устройство (механический редуктор, цепная передача, ходовая пара «винт-гайка» и т.д.). Оно позволяет, при необходимости, согласовать выходные параметры двигателя (частоту вращения и момент) в параметры, требуемые для приведения в движение исполнительного механизма. Например, преобразовать вращение вала двигателя в линейное перемещение каретки.
Датчики обратной связи Д1 и Д2 возвращают в устройство управления информацию, соответственно, о состоянии двигателя и исполнительного механизма. Строго говоря, во многих системах используется только один из этих датчиков.
Отметим, что часто под приводом понимают только устройство управления, силовой преобразователь и датчик обратной связи Д1.
Ключевым элементом управляемого электропривода является устройство управления. В современных приборах это, как правило, микроконтроллер. Решения на жесткой логике и аналоговые решения, популярные до 90-х годов, теоретически возможны, но выглядят явным анахронизмом.
Требования к микроконтроллерам,
как к устройствам управления электроприводом
Прежде чем рассматривать линейку микроконтроллеров, рекомендуемых компанией STMicroelectronics для задач управления приводами, попытаемся сформулировать некоторые основные требования к ним:
1. Устройство управления должно получать от задающего устройства некую информацию. Это могут быть: требуемая скорость движения исполнительного механизма, выбор варианта режима работы, коэффициенты автоматического регулирования и любая другая информация, необходимая для автономного управления приводом. В качестве задающего устройства могут быть компьютер, другие контроллеры многопроцессорной системы, пульт дистанционного управления и другие, вплоть до нескольких кнопок или регуляторов бытового прибора. В первом случае нужен стандартный интерфейс: USB, SPI, I2C. Во втором, оптимальным вариантом представляется протокол CAN. Для пульта дистанционного управление необходим IrDA - канал передачи данных в инфракрасном диапазоне. Для кнопок и регуляторов - наличие цифровых линий ввода-вывода и аналогового ввода.
2. Устройство управления должно получать информацию от датчиков обратной связи и выдавать управляющие воздействия на электродвигатель через силовой драйвер. Поскольку эти процессы проходят непрерывно, то желательно минимизировать вычислительную нагрузку от этих операций на микроконтроллер. Именно для автономной реализации этих задач во многих микропроцессорах (не только STMicroelectronics) используются модули захвата/сравнения/ШИМ (или Capture/Compare/PWM). При выборе микроконтроллера необходимо соотносить требования решаемой задачи и параметры таймерной системы: количество входов захвата, выходов сравнения, выходов сигналов с широтно-импульсной модуляцией, а также количество и разрядность внутренних таймеров общего назначения.
3. В большинстве случаев при подключении электродвигателя используют падение напряжения на токовом датчике. Эти сигналы редко применяются в контуре управления, но их желательно использовать в качестве сигналов аварийного отключения. Соответственно, микроконтроллер, используемый как устройство управления электроприводом, должен иметь достаточное количество входов аналогового ввода (АЦП или аналоговых компараторов).
Рассуждения о том, какая разрядность (8, 16 или 32 бита) и форма представления данных (фиксированная или плавающая точка) оптимальны для задач управления приводом, имеют долгую историю. В основе алгоритмов автоматического регулирования лежит операция свертки - арифметическая сумма произведений. По мнению автора, восьми разрядов достаточно для представления коэффициентов и непосредственно данных. Но их произведение и свертка, в целом, уже будут 16-разрядными.
Казалось бы - 8-разрядные микропроцессоры должны отживать. Но это не совсем так. Применение отечественными разработчиками микроконтроллеров для управления приводами началось в конце 80-х годов. Причем, альтернативы отечественным 8-ми разрядным микроконтроллерам 1816ВЕ51 (аналог - Intel8051) просто не было. Но практически сразу появилась программная библиотека 16-разрядной арифметики, которая подключалась к основной программе при сборке. Конечно, это было вынужденное решение, но к моменту доступности 16-разрядных микроконтроллеров (середина 90-х) у всех фирм, работавших «по приводам», был весьма объемный багаж программных наработок именно для 8-разрядных устройств, отбросить который было непросто, да и незачем. Кроме того, в обработке сигналов существует принцип нормирования данных - если на входе используются 8-разрядные данные, но и на выходе должны быть 8-разрядные данные. А тогда разрядность промежуточных данных - внутренний вопрос алгоритмов обработки. Отсюда вытекает вывод - в тех задачах управления приводами, где достаточно восьми разрядов для представления данных, оптимальным представляется применение именно 8-разрядных микроконтроллеров при обязательном наличии в системе команд операций 16-разрядной арифметики.
Основная область применения 32-разрядных микроконтроллеров (для управления приводами) будет рассмотрена ниже.
В линейке компании STMicroelectronics представлены как 8-, так и 16- и 32-разрядные микроконтроллеры. Остановимся на наиболее современных их них: 8-разрядном семействе STM8S и 32-разрядном семействе STM32F.
Семейство 8-разрядных
микроконтроллеров STM8S
Архитектура данного семейства довольно подробно рассмотрена в [1]. Мы рассмотрим их с точки зрения управления приводами. Состав семейства и технические характеристики входящих в него микросхем также представлены в [1]. На рисунке 2 приведена карта этого семейства.
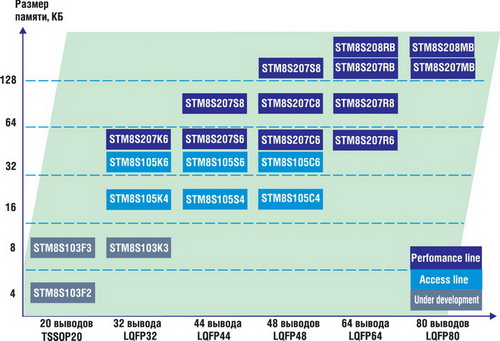
Рис. 2. Микроконтроллеры семейства STM8S
В семействе можно выделить два подмножества: экономичная линия (S105) и производительная линия (S207 и S208).
Экономичная линия: Flash-память для хранения программ: 16К или 32К; ОЗУ данных - 2К; EEPROM-память данных - 1К (используется для хранения постоянных значений: коэффициентов, таблиц пересчета и пр.). Корпуса - 32, 44 или 48 Производительная линия: Flash-память для хранения программ: 32К, 64К или 128К, ОЗУ данных - 2К, 4К или 6К; EEPROM-память данных - 1К; 1,5К или 2К. Корпуса - 32, 44, 48, 64 или 80 выводов.
Ключевые параметры:
- От семи до десяти каналов 10-ти разрядного АЦП.
- Таймеры: три 16-разрядных и один 8-разрядный.
- Модули захвата/сравнения/ШИМ: по 8-9 входов захвата и выходов сравнения, 11-12 выходов ШИМ-сигнала.
- Интерфейсы: SPI, UART, I2C.
- Наличие операций 16-разрядной арифметики.
Отметим следующее: внутренняя структура периферии отдельных представителей этого семейства в целом идентична, но различное число внешних выводов накладывает ограничение на количество универсальных линий ввода/вывода и одновременное использование ряда периферийных устройств. То есть многие линии имеют альтернативное использование. Кроме того, для микросхем с малым числом внешних выводов имеется основная и ряд альтернативных конфигураций периферийных модулей, переключаемых путем настройки соответствующих программных регистров.
В целом же таймерная и аналоговая подсистемы, набор стандартных последовательных интерфейсов, достаточное количество универсальных входов/выходов позволяют с успехом использовать это семейство для решения задач управления одним или несколькими приводами, связанными единым алгоритмом работы. Наличие в серии S208 интерфейса CAN позволит интегрировать автономные привода в распределенные многопроцессорные системы.
Отметим также ожидаемое в ближайшее время появление на рынке экономичной серии S103 с объемом Flash-памяти 4К и 8К в 20- и 32-выводных корпусах. Микроконтроллеры этой серии ориентированы на наиболее простые и экономичные приложения.
Семейство 32-разрядных
микроконтроллеров STM32F
Семейство микроконтроллеров STM32F, в котором используется ARM-ядро CORTEX-M3, - один из первых случаев внедрения 32-разрядной ARM-архитектуры в приложения управления приводами, где до этого применялись в основном 8-ми или 16-ти разрядные микроконтроллеры. Особенности архитектуры этого семейства подробно рассматривались в [2]. В настоящее время это семейство насчитывает более 50 микроконтроллеров, технические характеристики которых приведены в [3]. На рисунке 3 приведена карта этого семейства.
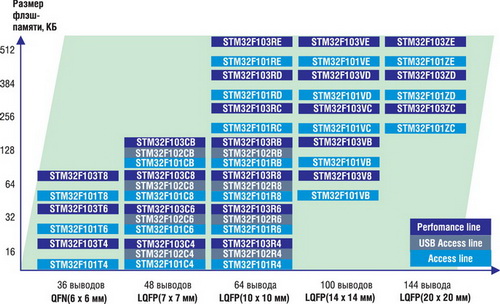
Рис. 3. Микроконтроллеры семейства STM32F
Отличительные особенности архитектуры семейства STM32F с точки зрения задач управления приводами (помимо ARM-ядра):
- Flash-память программ- от 16К до 512К, данных- от 4К до 64К.
- Аналоговая подсистема. Типовым вариантом является 16 каналов 12-разрядных аналого-цифровых преобразователей. В корпусах с 144 выводами- 21 канал. Большое число каналов позволяет использовать не только аналоговые сигналы токовых датчиков двигателей, но и дополнительные сигналы от аналоговых датчиков различного назначения.
- Таймерная подсистема. Число универсальных таймеров в корпусах с большим числом выводов увеличено до 6...8. Число каналов захват/сравнение- до 16...24, линий ШИМ-сигналов- до 18...28. Это позволяет реализовать управление не одним, а десятью приводами в одном микроконтроллере.
- Интерфейсная система. Добавлена дополнительная линия - экономная с USB. В производительной линии USB присутствует в обязательном порядке. Увеличено общее число различных последовательных портов. Интерфейс CAN присутствует во многих моделях.
- Резко увеличено число универсальных входов/выходов, что позволяет подключать большое количество внешних датчиков (аварийных, концевых выключателей и т.д).
Область применения 32-разрядных микроконтроллеров - прецизионные приводы, а именно - оборудование для точной механики, оптических систем, научного приборостроения. Еще 15 лет назад принципу «один двигатель - один микроконтроллер» альтернативы не было. Кроме того, ограниченные вычислительные ресурсы не позволяли реализовывать уже существовавшие алгоритмы нетривиального регулирования (адаптивные, с изменяемыми параметрами и прочие) даже для одного привода. Разработчики сложных систем стремились «положить» в один микроконтроллер управление несколькими приводами, поскольку это избавляло от необходимости строить многопроцессорную систему. Но даже если состав периферии позволял это сделать, то камнем преткновения становился вычислительный ресурс.
Возможности приборов класса STM32F позволяют не только управлять многими приводами, увязывая работу в единый алгоритм, но и использовать при этом достаточно сложные в вычислительном отношении алгоритмы обработки.
Силовой преобразователь (драйвер)
Силовые преобразователи компании STMicroelectronics можно разбить на две основные группы. К первой относятся одинарные мосты - L6201/02/03, которые, как правило, используются для управления однофазными двигателями постоянного тока. При этом электрические параметры существенно зависят от типа используемого корпуса. В таблице 1 представлены основные параметры одинарных мостов.
Таблица 1. Одинарные мосты STMicroelectronics
| Наименование | Рабочий ток, А | Рассеиваемая мощность, Вт при t = 70°С | Сопротивление транзисторов, Ом |
|---|---|---|---|
| L6201 | 1 | 0,9 | 0,3 |
| L6202 | 1,5 | 1,3 | 0,3 |
| L6203 | 4 | 2,3 | 0,3 |
Ко второй группе относятся двойные мосты - L6204/05/06/07. Их используют для управления двухфазными двигателями, например, шаговыми. В таблице 2 приведены основные параметры двойных мостов.
Таблица 2. Двойные мосты STMicroelectronics
| Наименование | Рабочий ток, А | Рассеиваемая мощность, Вт при t = 70°С | Сопротивление транзисторов, Ом |
|---|---|---|---|
| L6204 | 0,5 | 1,23 | 1,2 |
| L6205/06*/07** | 2,8 | – | 0,3 |
| * L6206 отличается от L6205 наличием встроенной программируемой защиты по току. ** L6207 имеет два интегрированных ШИМ контроллера. | |||
В принципе силовой преобразователь - компонент, в значительной степени зависящий от типа используемого электродвигателя. В качестве примера рассмотрим управление коллекторным (щеточным) двигателем постоянного тока. Частота вращения вала такого двигателя зависит от величины напряжения, приложенного к обмоткам, а направление - от его полярности. В настоящее время редко регулируют именно величину напряжения - используют сигнал с максимальной амплитудой, но с широтно-импульсной модуляцией (ШИМ). Скважность ШИМ-сигнала определяет частоту вращения. Обобщенная структура привода (полный мост) коллекторного двигателя постоянного тока приведена на рисунке 4.
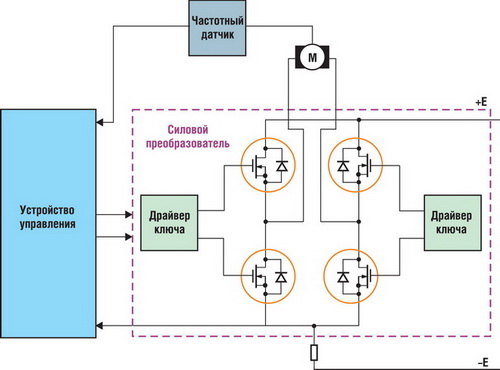
Рис. 4. Структура привода коллекторного двигателя постоянного тока
Очевидно, что транзисторы по отношению к микросхеме драйвера могут быть как внешними (при работе с мощными двигателями), так и интегрированными. В качестве примера рассмотрим полномостовой драйвер L6203 компании STMicro с рабочим током до 4 А. Его структура и таблица состояний представлены на рисунке 5.
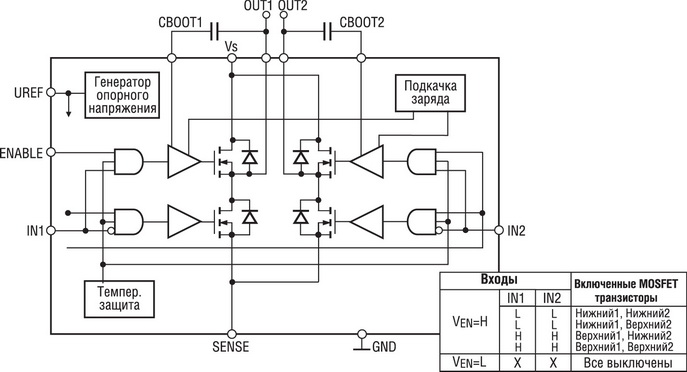
Рис. 5. Структура полномостового драйвера L6203
Если на вход разрешения ENABLE подан высокий уровень напряжения, а состояния входов IN1 и IN2 различны, то через двигатель протекает ток и происходит вращение вала. Если состояния на входах одинаковы, то обмотки двигателя замкнуты между собой через землю или питание (режим динамического торможения). Будем считать, что протекание тока от OUT1 к OUT2 - это прямое вращение, а наоборот - обратное.
Таким образом, если двигатель управляется от высокого уровня логического сигнала, то для его прямого включения необходимо подать ШИМ на вход IN1 и низкий уровень на вход IN2. Для обратного вращения - наоборот. Останов - два низких уровня. Если двигатель управляется от низкого логического сигнала, то для его прямого включения необходимо подать ШИМ на вход IN1 и низкий уровень на вход IN2. Останов - два высоких уровня.
Возможно также управление через вход разрешения ENABLE, но это менее эффективно, поскольку при простом выключении всех транзисторов обмотки двигателя просто «повисают в воздухе» и вал продолжает вращаться по инерции. При этом и останов, и выход двигателя на заданный режим занимают существенно большее время.
Принцип использования драйверов с внешними транзисторами идентичен. С силовыми компонентами (драйвера, MOSFET- и IGBT-транзисторы, IGBT-модули), выпускаемыми компанией STMicroelectronics, можно познакомиться в [4].
Мы рассмотрели управление простейшим однофазным двигателем. При управлении многофазными (например, шаговыми) двигателями необходимо несколько ШИМ-сигналов, сдвинутых по отношению друг к другу определенным образом. Напомним, что генерация ШИМ-сигналов в микроконтроллерах, а также увязка их в заданную временную циклограмму осуществляется средствами модулей захвата/сравнения/ШИМ.
Несколько слов о датчиках обратной связи
Если обратная связь снимается с вала двигателя (датчик Д1 на рис. 1), то для стабилизации частоты вращения в качестве датчиков обратной связи используются либо тахогенераторы (аналоговый сигнал, пропорциональный угловой скорости), либо частотные датчики. В качестве частотных датчиков главным образом применяются датчики Холла либо оптоэлектронные датчики. Здесь выходной сигнал имеет прямоугольную форму. Есть два способа измерения: измерение периода импульса (частоты) и подсчет числа импульсов за определенный период времени (измерение угловой скорости). Оба эти способа в микроконтроллерах также реализуются средствами модулей захвата/сравнения/ШИМ.
Инструментарий,
используемый для изучения и отладки решений
Компания STMicroelectronics поддерживает свои изделия комплексом программных и аппаратных средств разработки. Стартовые наборы STM8/128-MCKIT и STM3210B-MCKIT являются недорогими платформами, спроектированными для ускорения разработки приложений управления приводами, основанных на микроконтроллерах семейств STM8S и STM32F, соответственно.
В комплект набора STM3210B-MCKIT входят следующие модули:
- Модуль программирования и отладки SEGGER J-Link.
- Плата оптоизоляции AI-JTAG/OPTO-1.
- Плата с микроконтроллером STM3210B-EVAL.
- Плата силового преобразователя MB459B.
- Трехфазный синхронный двигатель постоянного тока A 24V DC SHINANO.
- Индукционный двигатель переменного тока (опционально).
- Программное обеспечение включает в себя библиотеки и примеры на языке С.
Заключение
Компания STMicroelectronics предлагает широкий спектр компонентов, предназначенных для построения управляемых электрических приводов: микропроцессоры, специализированные микросхемы, активные дискретные компоненты, а также инструментальные средства, способствующие ускорению освоения как конкретной модели микроконтроллера, так и определенной области его применения.
Литература
1. Савичев А. Новые 8-битные микроконтроллеры семейства STM8S// Новости электроники. 2009. ╧2.
2. Бородулин А. STM32 - универсальное решение на ARM-ядре// Новости электроники. 2008. ╧8.
3. STM32 MCU Family// brstm320808.pdf - документ, доступный на сайте компании ST Microelectronics.
4. Motor Control. Selection Guide// sgmotor1008.pdf- документ, доступный на сайте компании ST Microelectronics.
Получение технической информации, заказ образцов, поставка - e-mail: analog.vesti@compel.ru
